+965 51122049
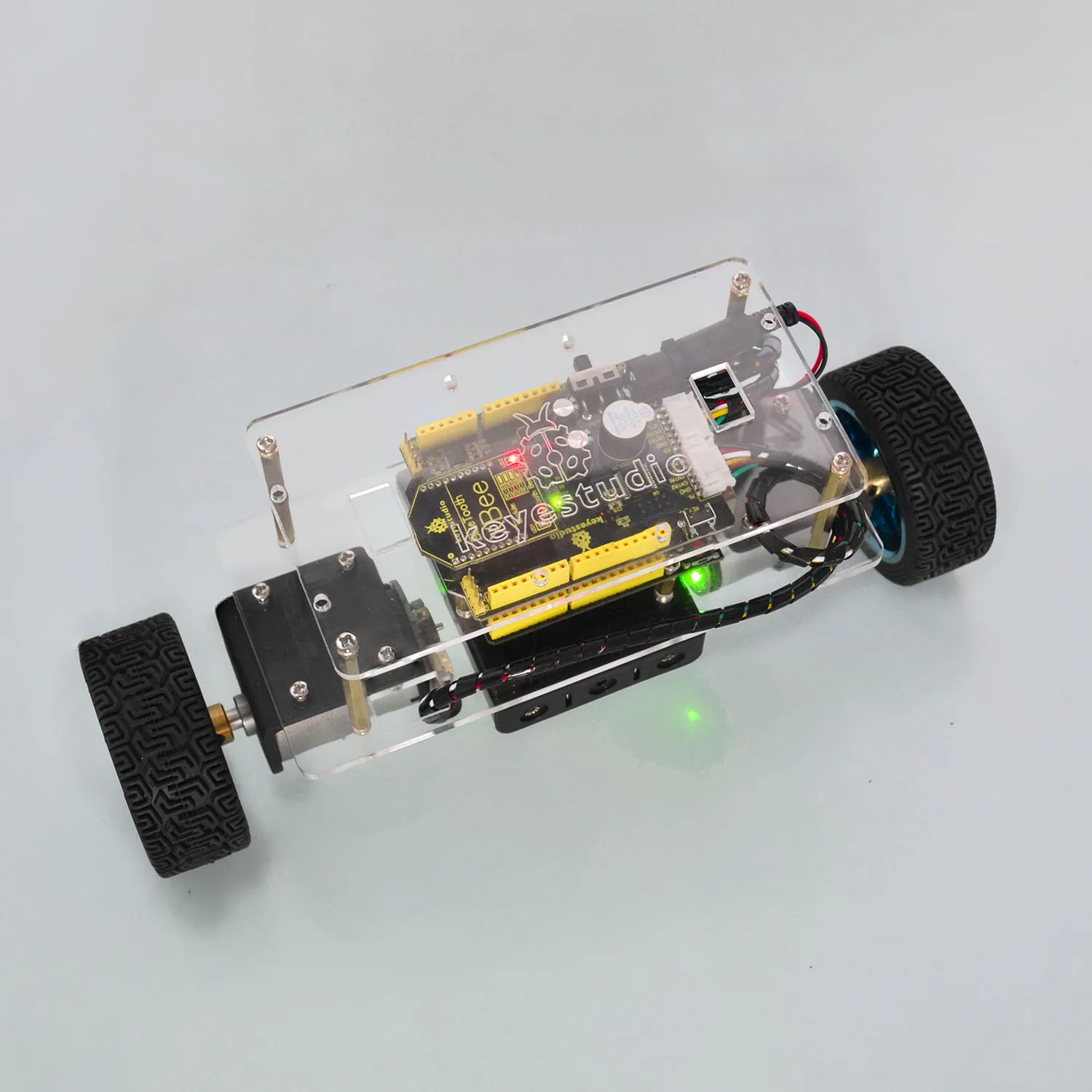
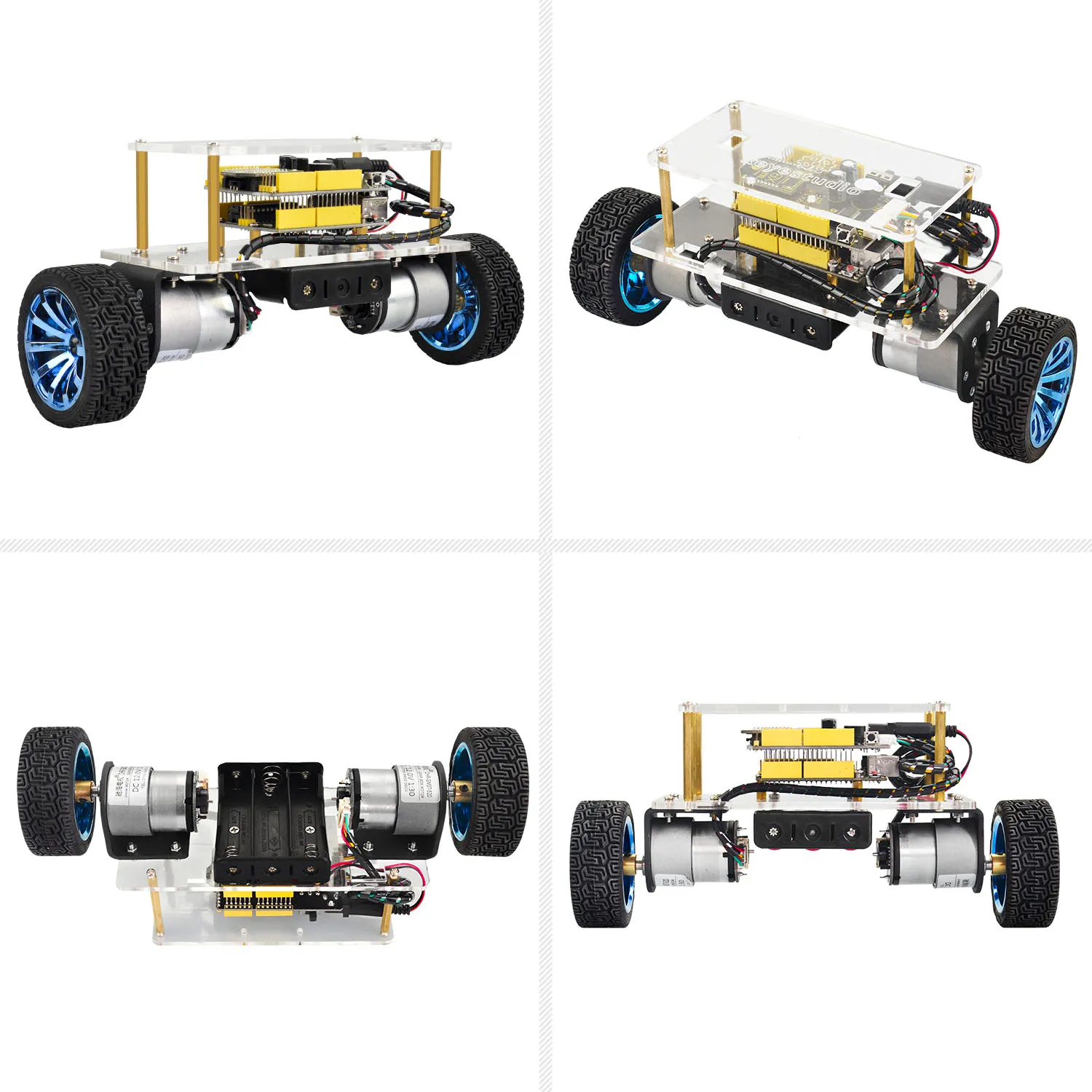
Best Quality APP Control BT Module Self-balancing Robot Car Kit for Arduino
In this way, it is relatively simple to understand the three control tasks.
But in the final control process, it comes down to the control of a control quantity. So there will be coupling between the three tasks, which will interfere with each other.
The key is to control the car’s balance; the speed and direction control should be as smooth as possible. 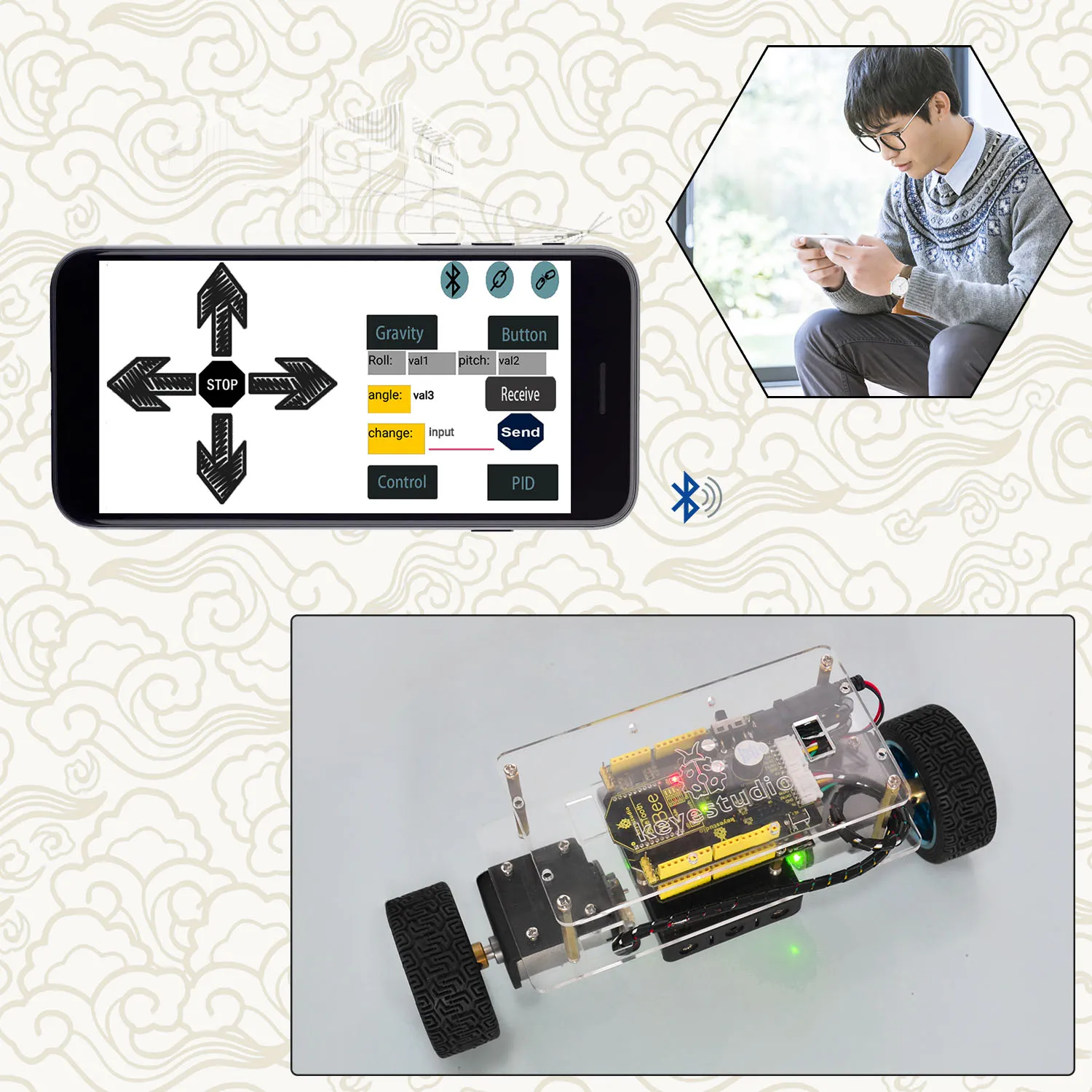




Your email address will not be published. Required fields are marked *
Please login to write review!
Looks like there are no reviews yet.
Keyestudio Water Level Sensor Droplet Detection Module for Arduino UNO R3 KS0048
Keyestudio Turbidity Sensor V1.0 With Wires Compatible with Arduino for Water Testing KS0414
Keyestudio Motion Sensing Glove Gesture Nano Control Smart Car for Arduino Programming Learning Based MPU6050(No battery) KS0564
Keyestudio 3 set of Dupont line jumper wire Dupont cable 20cm M-F &M-M & F-F (each 40 wire) for Arduino Projects